Thor and Loki
My Contribution Highlights
- Stayed on-campus over the summer to work on robot software in preparation for the 2016 RoboSub competition in July, in which we achieved 3rd place internationally
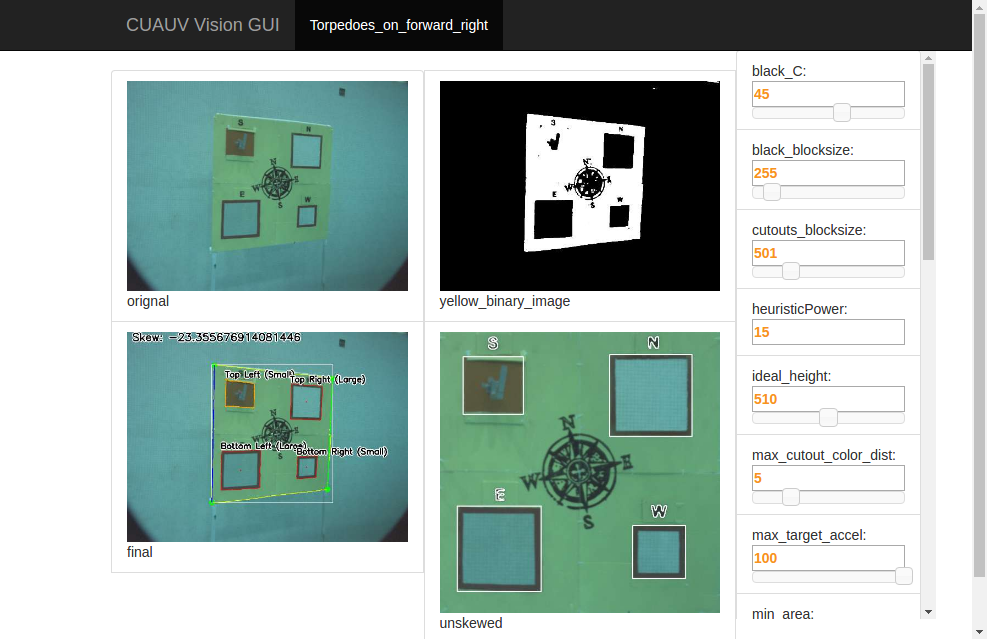
- Implemented computer vision and high-level control software to identify targets labeled with letters, remove a physical cover from a target, and shoot plastic projectiles at targets with specified letters

Project Info
- Robot Type: Pair of Mobile Underwater Robots
- Application: International RoboSub 2016 Competition Entry (Won 3rd place)
- Organization: Cornell University Autonomous Underwater Vehicle Team (GitHub)
- Personal Role: Software Team Member, September 2015 – July 2016
More About My Experience
CUAUV was my first experience working on a relatively complex robotics project, an underwater robot with a 50-person team consisting of about 15 software team members. (I had competed in high school robotics, but I was leading a relatively small 3-person team.) The objective of CUAUV is to produce a robot to compete in the international RoboSub competition. The competition consists of a series of tasks of varying difficulty, which a fully autonomous robot can choose to complete in order to gain points. As a team member, I developed an interest in computer vision, researching topics such as graph-based image segmentation to enable object detection invariant to lighting conditions and visual egomotion in order to caculate velocity without an expensive sonar sensor. I implemented simple proof-of-concept prototype algorithms for both of these.
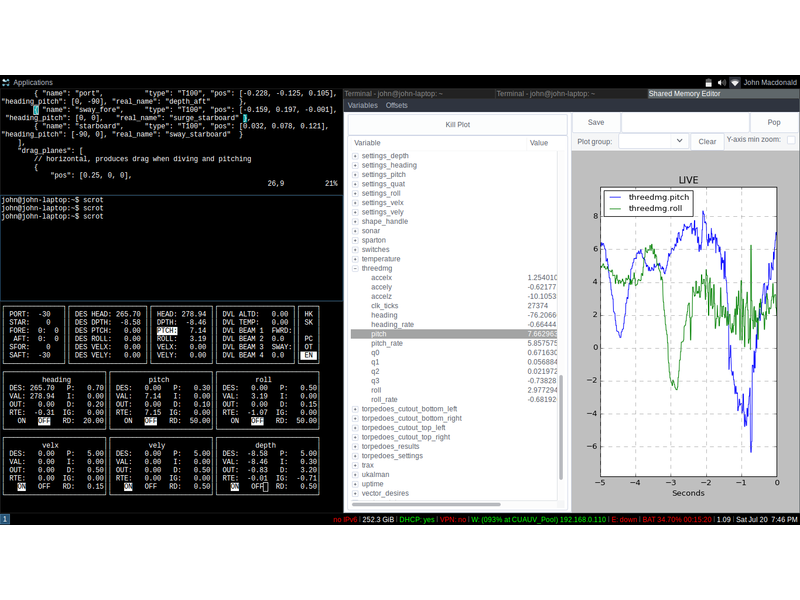
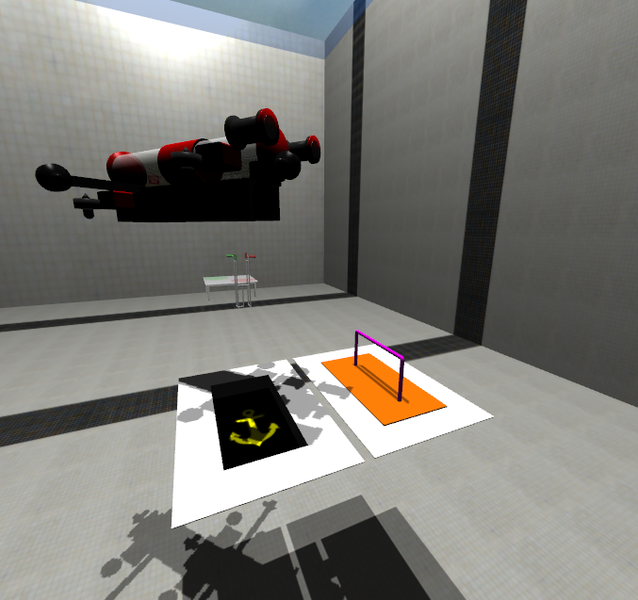
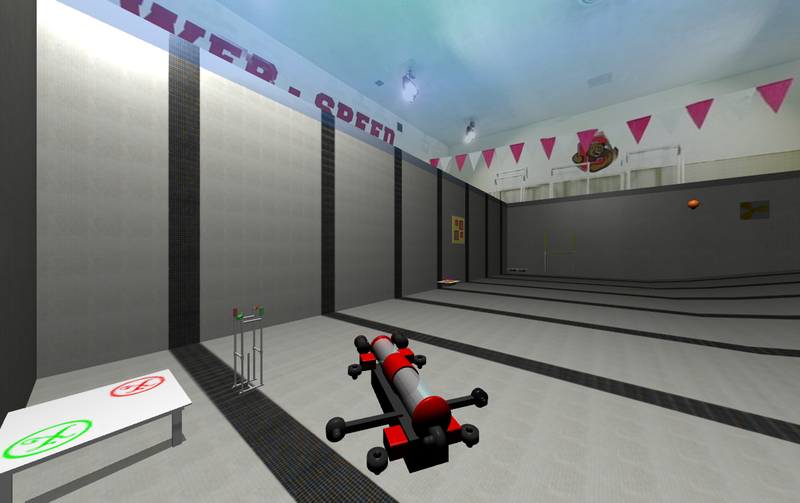
As the competition takes in July, some team members opt to stay on-campus over the summer to work on the robot. I opted to stay during Summer 2016 as a sophmore. I worked extensively on computer vision algorithms and high-level state machine and control logic to to complete the “Torpedoes” task at RoboSub 2016. The task consisted of identifing targets labeled with letters, removing a physical cover from a target, and shooting plastic projectiles at targets with specified letters. I spent nearly all of my time that summer writing computer vision code, testing and collecting logs in the pool, and revising and re-desgining code as needed to account for new failure modes, re-running against the collected log data, and finally re-testing in the pool.
I had a fantastic experience attending RoboSub 2016, speaking with other teams about how they had approached the challenges and watching my code manuver the vehicle around the obstacle course. I was super excited when our team acheived third place.