Junior
My Contribution Highlights
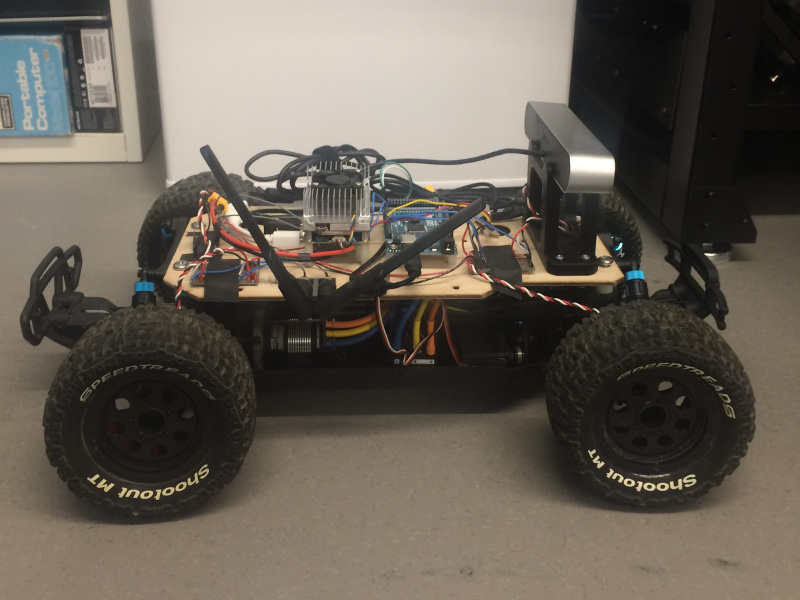
- Wrote software to integrate a stereo camera, IMU, and RC car chassis with ROS to create a research platform
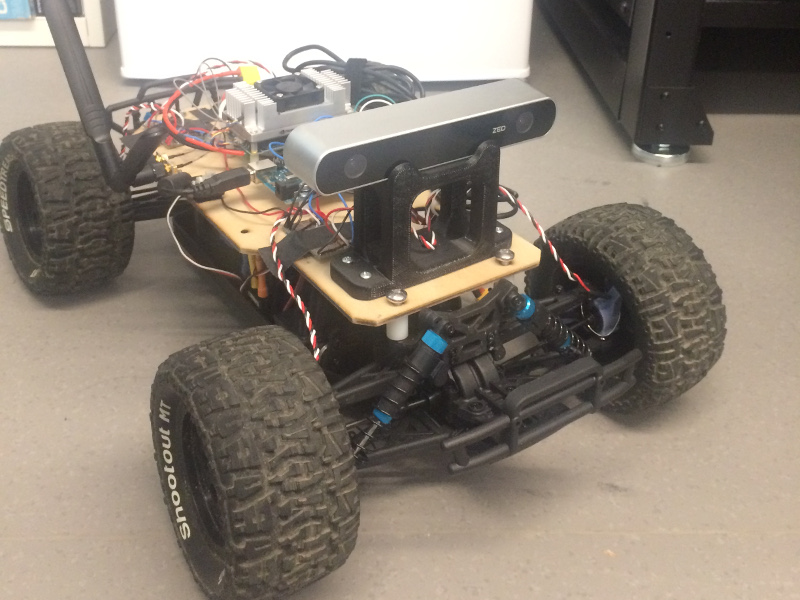
A ZED stereo camera is used for obstacle detection and navigation. An NVIDIA Jetson TX1 serves as the main computer.
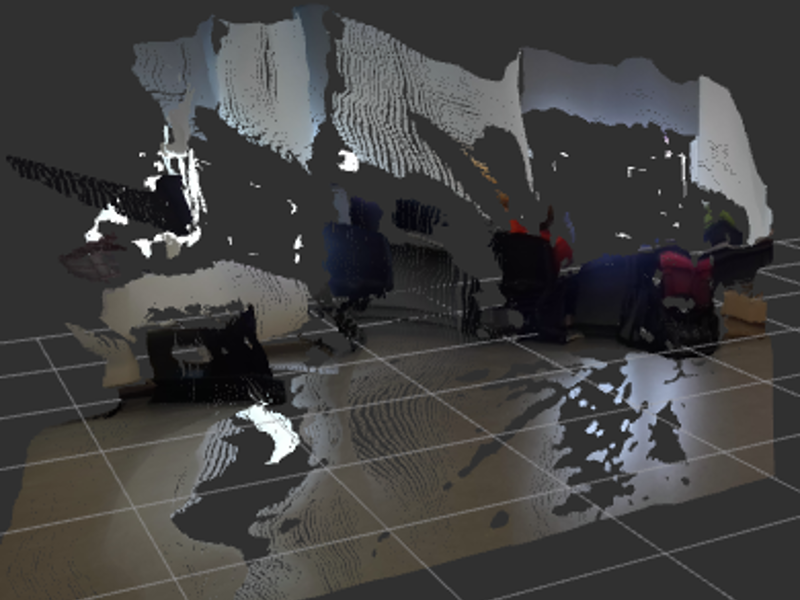
Point cloud calculated by the ZED stereo camera being visualized by rviz.
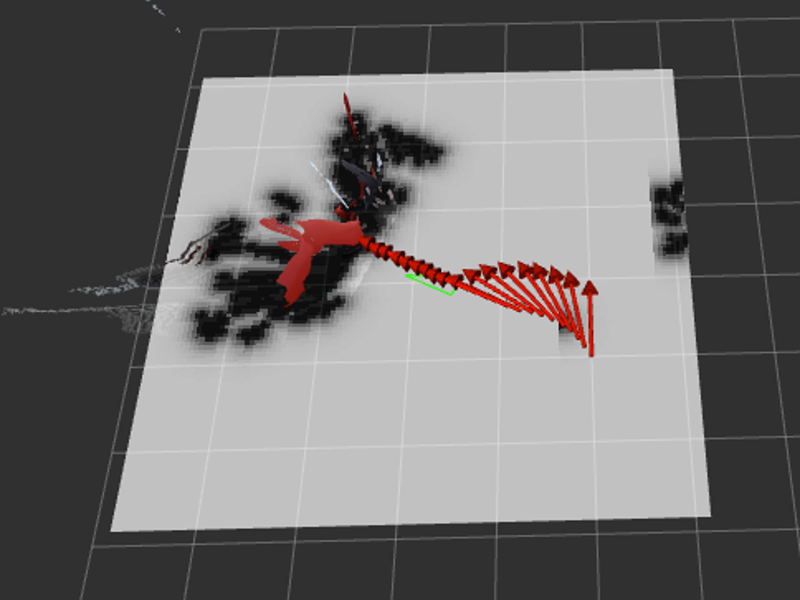
Visual odometery from the ZED and local map from the ROS navigation stack being visualized by rviz. The red object is a point cloud of a red sofa.

Project Info
- Robot Type: Miniature Robotic Car
- Application: Class project which became a research platform
- Organization: Cornell University Robotic Personal Assistants Lab
- Personal Role: Class Project Team Member, January 2017 – May 2017