Bruce and Bumblebee
My Contribution Highlights
- Worked on robots for both crop monitoring and vineyard pruning at the Carnegie Mellon Field Robotics Center as part of an industry-academia partnership for my Master's
- Designed and implemented vineyard row detector neural network
- Designed and implemented geometric line-fitting based row navigation for agricultural robots (superseded by neural network)
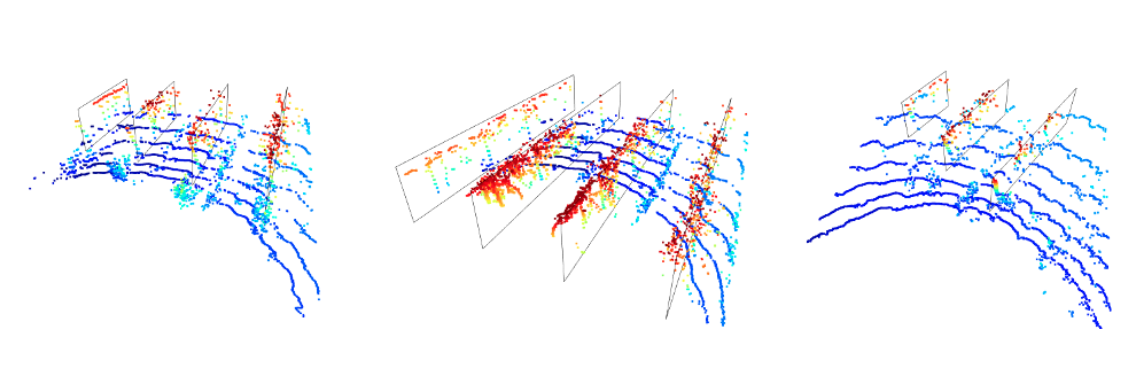
Vineyard row detections from the row detection neural network operating on Bumblebee's lidar sensor. The target application is navigation of a vineyard for pruning.
Autonomous row following using the geometric line fitting approach for Bruce. The blue camera has a flash to enhance images for crop monitoring. This was superseded by a neural network based row detector for Bumblebee.

Debugging in the field!

Pests beware, Bruce is on patrol 😎
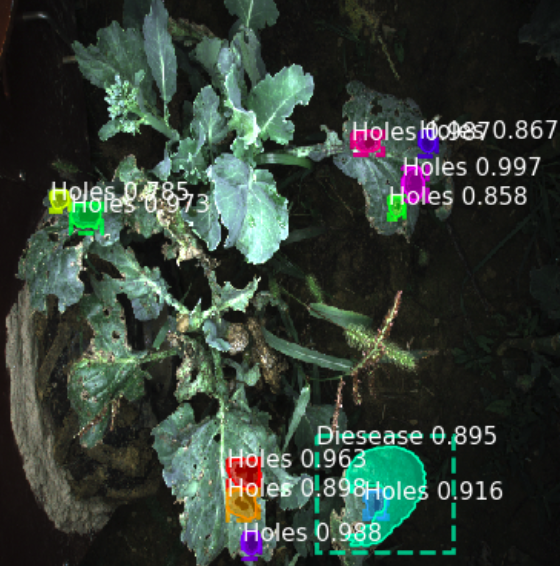
Results from Bruce's plant health monitoring

The Bumblebee vineyard pruning robot.
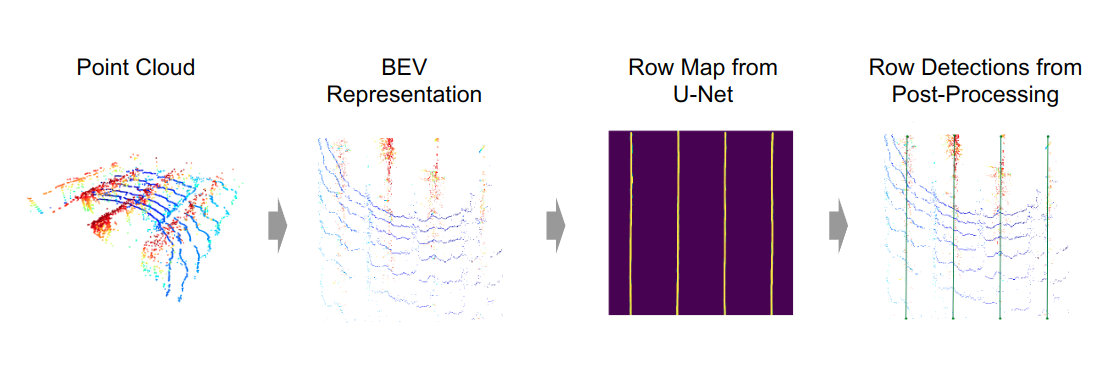
Flowchart of the neural network row detector. The pointcloud is projected into a bird's eye view, then vine rows are segmented with a U-Net style network, and finally lines are fit to the segments to yield detections.
Project Info
- Robot Type: Wheeled robots
- Application: Crop monitoring and vine pruning
- Organization: Carnegie Mellon Field Robotics Center / Rivendale Farms (Industry-Academia partnership)
- Personal Role: Master's Student, September 2018 – May 2020