Beam
My Contribution Highlights
- Transformed the novel Social Momentum algorithm from equations and MatLab simulations to Python code running in real-time on a ROS robot
- Designed and implemented framework for comparison of socially aware navigation algorithms running in real-time on a robot
- Co-authored a paper, "Effects of Distinct Robot Navigation Strategies on Human Behavior in a Crowded Environment," which was accepted to HRI 2019
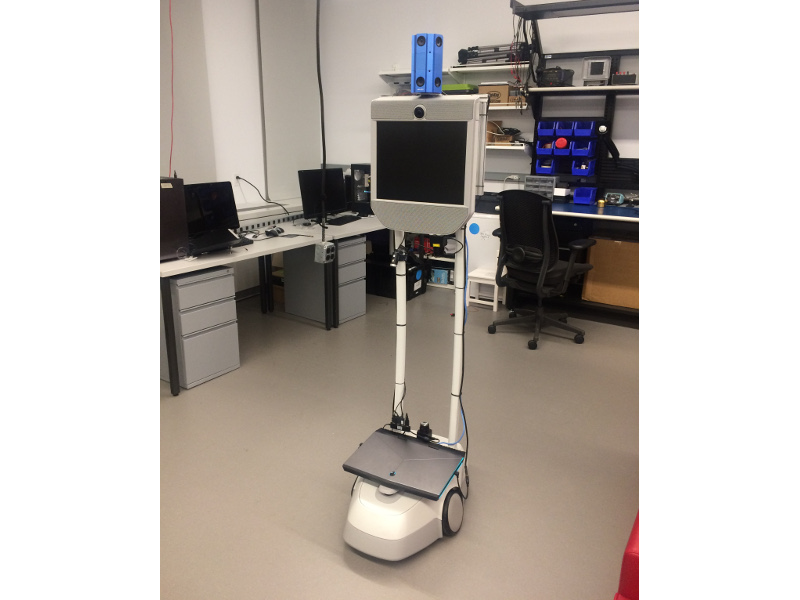
The robot consists of a BeamPro telepresence robot, an Occam Stereo for 360 stereo vision, a forward and read Hokuyo lidar sensors for obstacle avoidance and navigation, and a chest-level forward facing lidar for 2D to 3D correspondence during people tracking. An externally mounted Alienware 15 laptop running ROS Kinetic and equipped with a NVIDIA GTX 1080 GPU is used as the main computer.
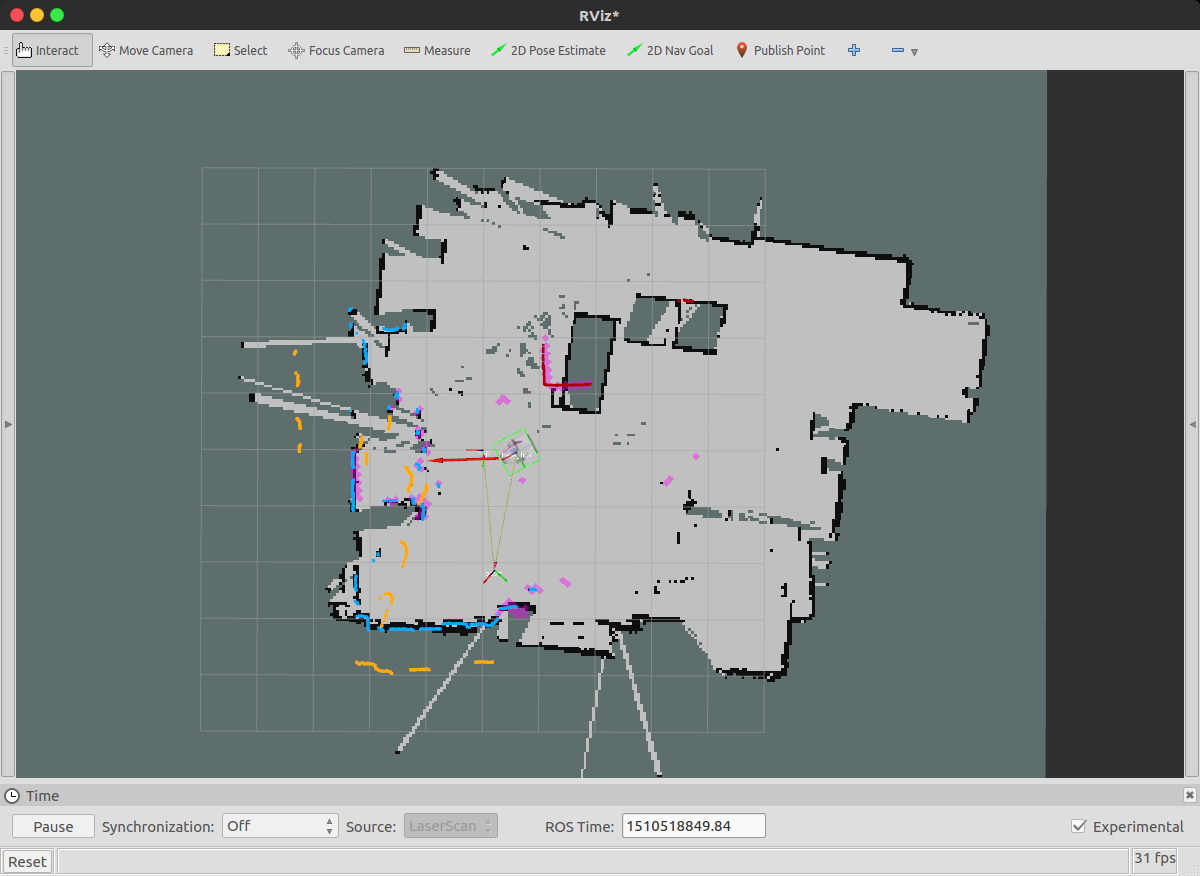
Overhead view in rviz of the map created by gmapping using a Hokuyo lidar sensor.
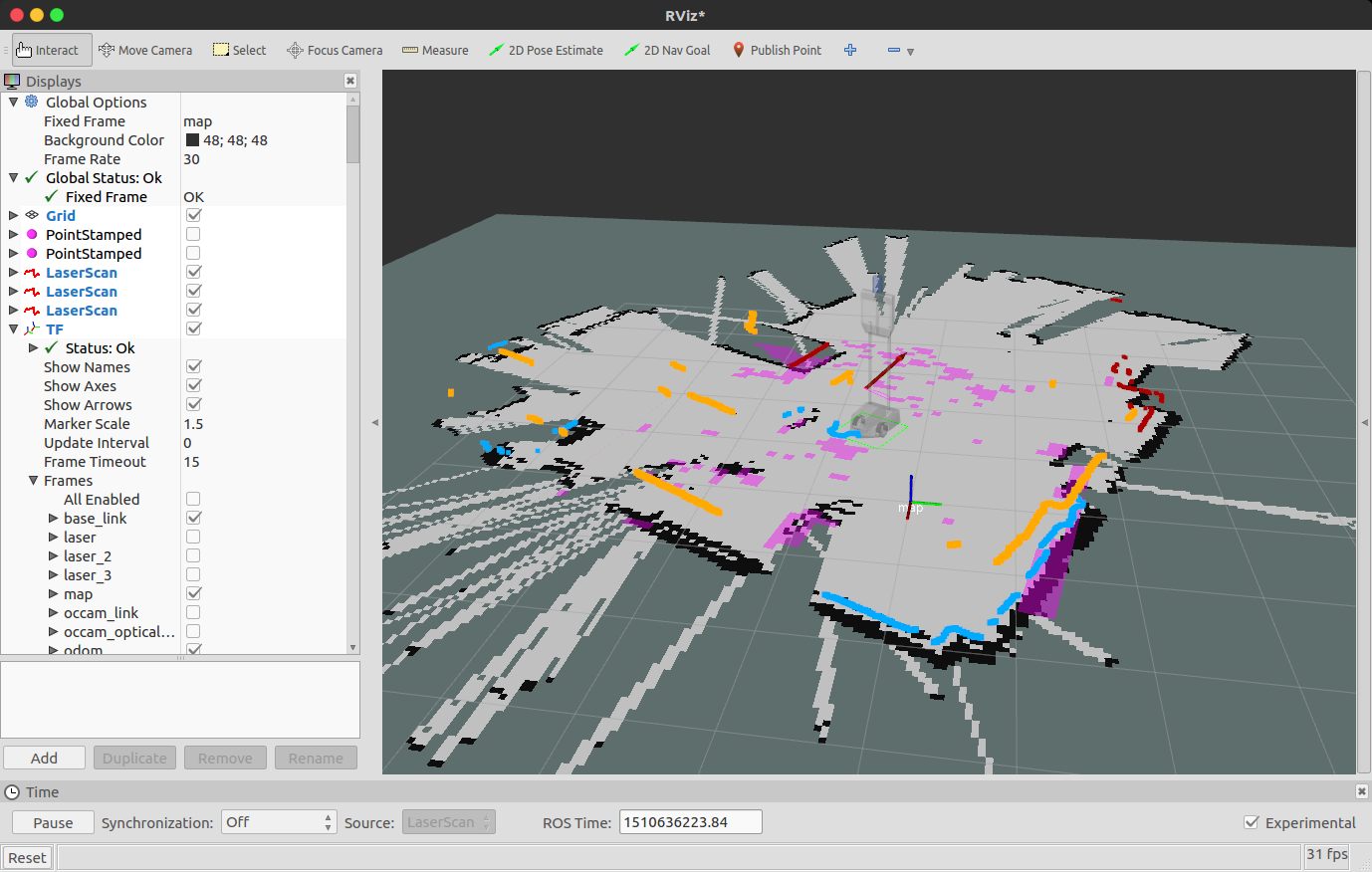
3d view in rviz of a different mapping run. The colored scans from the multiple lidar sensors (chassis forward, chassis rear, and chest) are more easily distinguishable. The chest-height lidar is used for 2D to 3D correspondence for the people tracker.
Project Info
- Robot Type: Two-Wheeled Mobile Indoor Robot
- Application: Research platform for socially competent navigation
- Organization: Cornell University Robotic Personal Assistants Lab (GitHub)
- Personal Role: Undergraduate Research Assistant, September 2017 – May 2018
More About My Experience
I spent my senior year of undergrad working in the Robotic Personal Asisstants Lab on the socially competent navigation project. My role was to move the project from a set of simulations running in Matlab to Python code running on a ROS robot in real-time. I designed and implemented an architecure which enabled modular swapping of different person perception and social navigation algorithms in order to gauge real-world performance.
In order to compare a range on algorithms, some which assumed certain motion constraints and some which did not, we converged on defining the action which an algorithm would take as an arbitrary velocity vector, which the framework would convert into wheel velocities using a feedback linearization approach. Additional constraints e.g. velocity magnitude constraint could be enforced by the framework in order to suit the platform being used.
I also implemented the lab’s novel Social Momentum algorithm inside this framework, as well as Optimal Reciprocal Collision Avoidance (ORCA) using the RVO library in order to demonstrate the interopability of the framework, as well as to enable comparison between different algorithms.
The social navigation framework which I designed and implemented was used to conduct experiments on social navigation, the results of which were summarised in a paper accepted to HRI 2019.